Further Information
Overview
An example project for a regular RoboticModule for PacDrive 3 Template looks like the following.
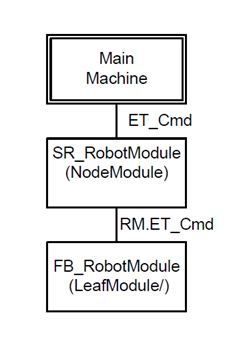
Under the MainMachine (called in SR_MainMachine.SubModulesAction), is a NodeModule (named SR_RobotModule) and under the SR_RobotModule the FB_RobotModule of the library RoboticModule is called (called in SR_RobotModule.SubModulesAction).
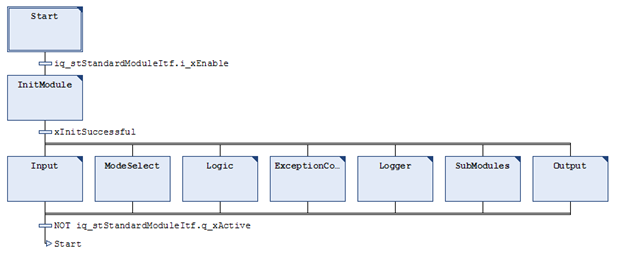
The SR_RobotModule in the example project looks like this:
-
PacDrive 3 Template
The code that is generated is an enhanced RoboticModule (RobotModule+).
The generated code for SmartTemplate looks like this, but only the is writeable/visible because it needs user adaptations. The other methods/actions are adapted automatically based on the graphical selection.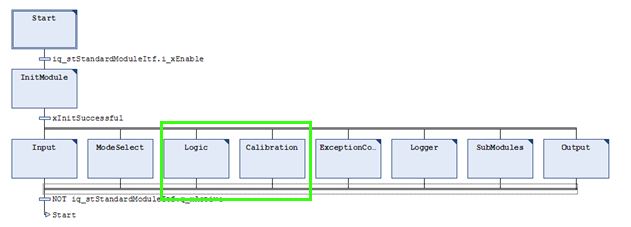
Adaptations of RobotModule+ compared to the FB_RobotModule of the library RoboticModule:
-
Adaptations of RobotModule+ compared to the FB_RobotModule of the library RoboticModule:
- The FB_RobotModule is initialized by the SR_RobotModule (Init_Robot, Init_A, Init_B, …)
- The FB_RobotModule cannot be used (per default) stand-alone with (or without) the PacDrive 3 Template.
-
Adaptations of RobotModule+ compared to the SR_RobotModule as it is in the example project:
- The initialization actions are adapted automatically, according to the graphical selected parameter in the .
-
-
Other environments
A RobotModule as it is described above under PacDrive 3 Template is generated, but it is wrapped in another program to create an interface (VAR_INPUT, VAR_OUTPUT, VAR_IN_OUT) without template structures.