FB_CollisionHandlerDelta3Ax - General Information
Overview
|
Type: |
Function block |
|
Available as of: |
V1.0.0.0 |
|
Inherits from: |
- |
|
Implements: |
IF_CollisionHandlerDelta3Ax |
|
Versions: |
Current version |
This chapter provides information on:
Description
Using this collision handler, starting from a set of parameters it is possible to automatically configure a collision entity representing the structure of a Delta3Ax robot. Then, it is possible to update the collision entity based on the joint positions or the TCP position of the robot.
Extends: FB_CollisionHandlerRobot
The following graphic presents the collision entity configuration for a Delta3Ax collision handler:
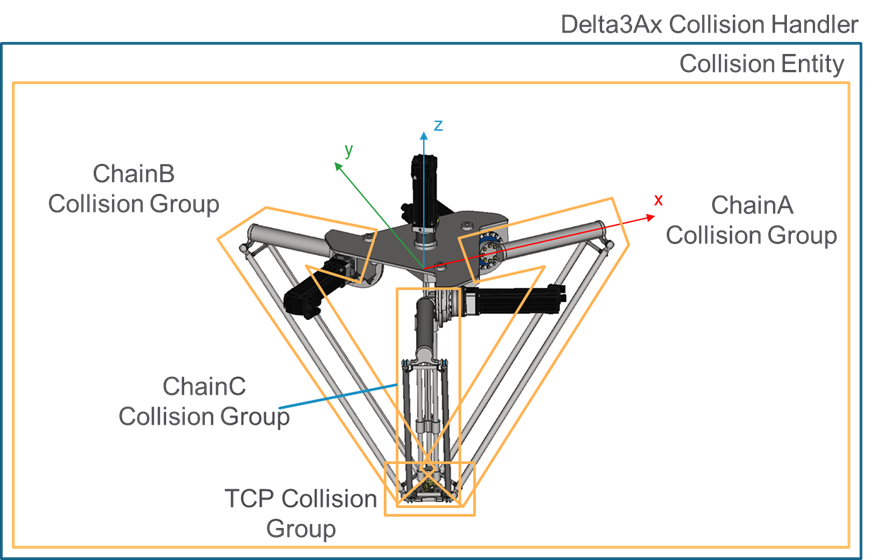
The collision entity of a Delta3Ax collision handler is configured with:
-
A capsule for each upper link, with point A configured as the Joint1 position and the point B evaluated along the Joint1-Joint2 direction at a position determined by the configured length of the link.
-
A capsule for each lower link, with point A configured as the Joint2 position plus/minus lrLowerLinksMountDistance along the Y-axis of the link frame and the point B evaluated along the direction from Joint2 to Joint3, at a position determined by the configured length of the link.
-
An OBB with extents determined by the configured values of stTCPBoxHalfExtents and center evaluated as the TCP position combined with the configured stTCPBoxPosition that is defined with reference to the TCP frame.
The optional additional axis is not included in such representation.
For more information on the parameters, refer to ST_Delta3AxParameters
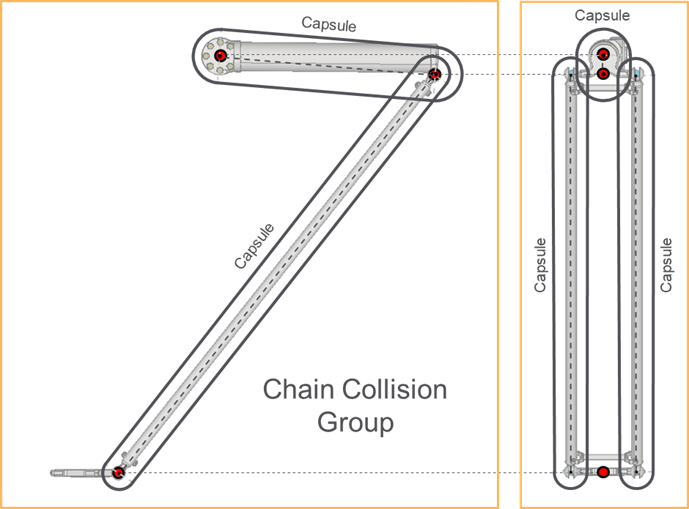
The following graphic shows a chain group of the collision entity of a Delta3Ax collision handler:
Properties
|
Name |
Data type |
Accessing |
Description |
|---|---|---|---|
|
xEnableTCPCollisionGroup |
BOOL |
Get, Set |
If TRUE, the collision group representing the TCP is enabled; if FALSE, the collision group is disabled.
NOTE: A disabled collision group is ignored by the collision and distance queries.
|
|
raxEnableChainCollisionGroup |
REFERENCE TO ARRAY [1...Gc_udiDelta3AxNumberOfJoints] OF BOOL |
Get, Set |
Each element of this property allows to enable (TRUE value) or disable (FALSE value) a collision group linked to one of the chains of the robot. It is possible to use the elements of ET_Delta3AxCollisionGroupIndex to index the desired collision group.
NOTE: A disabled collision group is ignored by the collision and distance queries.
|
|
xUpdated |
BOOL |
Get |
The property is set to TRUE if the latest call of the Update method was successful; FALSE otherwise.
NOTE: This property should have a TRUE value before using the function block with any of the collision or distance query functions.
|
|
xConfigured |
BOOL |
Get |
TRUE if the function block is configured, FALSE otherwise. |
|
ifCollisionEntity |
Get |
Reference to the collision entity configured and updated by the collision handler.
NOTE:
|
|
|
rstBasePosition |
REFERENCE TO SE_Math.ST_Vector3D |
Get |
Position of the entity with reference to a global coordinate system. |
|
etType |
Get |
The type of the collision handler; this is related to the type of represented module. |