IF_MoveSyncFromStandstill - StartSyncToExternalMaster (Method)
Description
The method StartSyncToExternalMaster allows a one-to-one synchronization of the carrier to an external master.
In synchronized movements of a carrier connected to an external master or to a master carrier in front or behind, the movement of the selected carrier is controlled by the master.
| CAUTION | |
|---|---|
As a precondition for calling the method StartSyncToExternalMaster, the selected carrier must be in standstill. The external master can be in motion. The value of the parameter RefVelocity must be 0. For more information on the carrier object and the parameter RefVelocity within the user function MovementData, refer to the Lexium™ MC multi carrier Device Objects and Parameters Guide.
In a section of the master movement defined by the start parameter i_lrXStartPhasingToMaster and the end parameter i_lrXEndPhasingToMaster, the carrier is phasing (synchronizing) to the master movement.
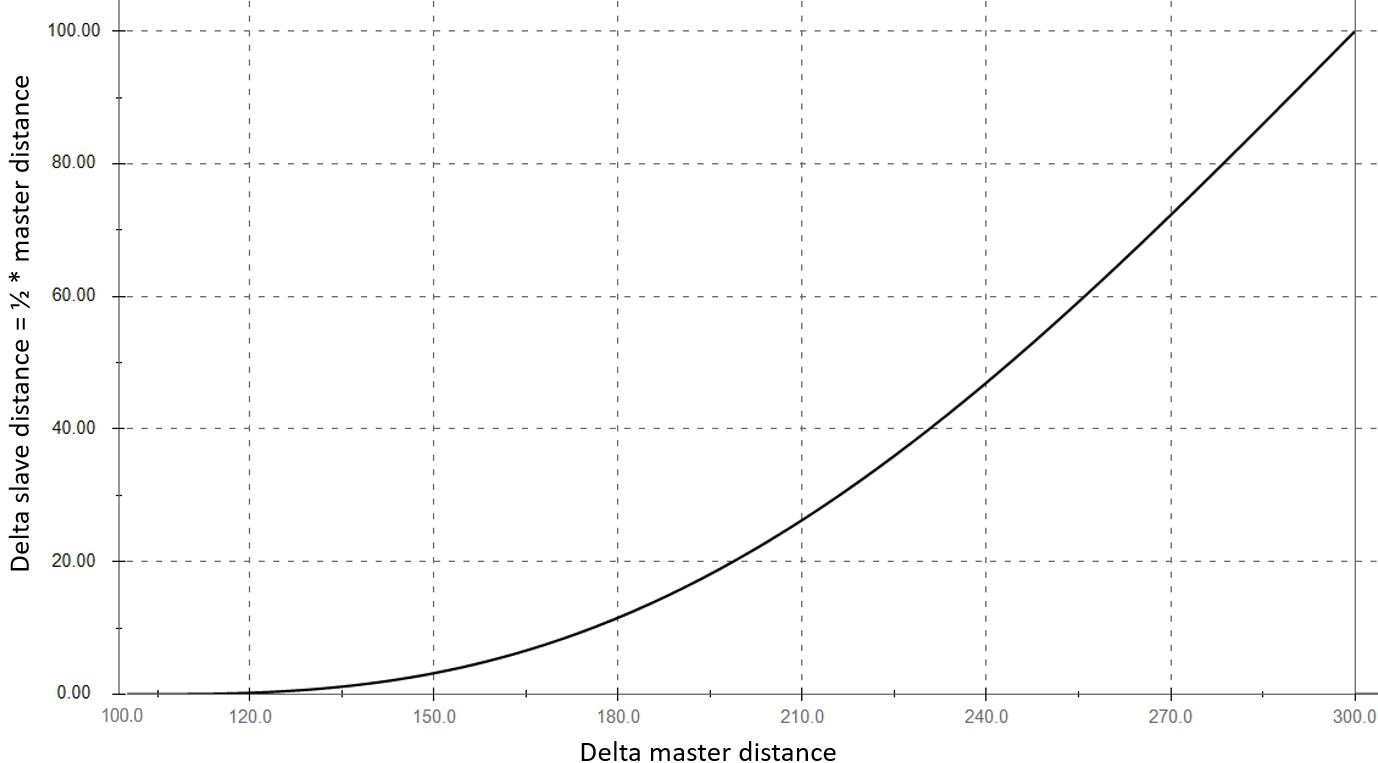
The start cam is defined as follows: In the same time period, the carrier runs half of the distance that the master moves between i_lrXStartPhasingToMaster and i_lrXEndPhasingToMaster (see example).
If i_lrXStartPhasingToMaster = 0 and i_lrXEndPhasingToMaster = 0, no start cam is calculated.
After phasing, the carrier follows the external master with a one-to-one cam.
With the synchronized movement, the carrier follows the master one-to-one without considering the motion parameters specified in the method SetMotionParameter.
For more information, refer to the description of the Synchronized Carrier Movement via C2C in the Lexium™ MC multi carrier Device Objects and Parameters Guide .
For additional information, refer also to the description of the function FC_SetMasterEncoder() in the SystemInterface library and to the description of the delay parameters in the LMC Pro Device Objects and Parameters Guide.
Example
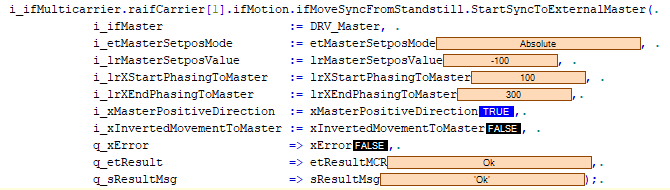
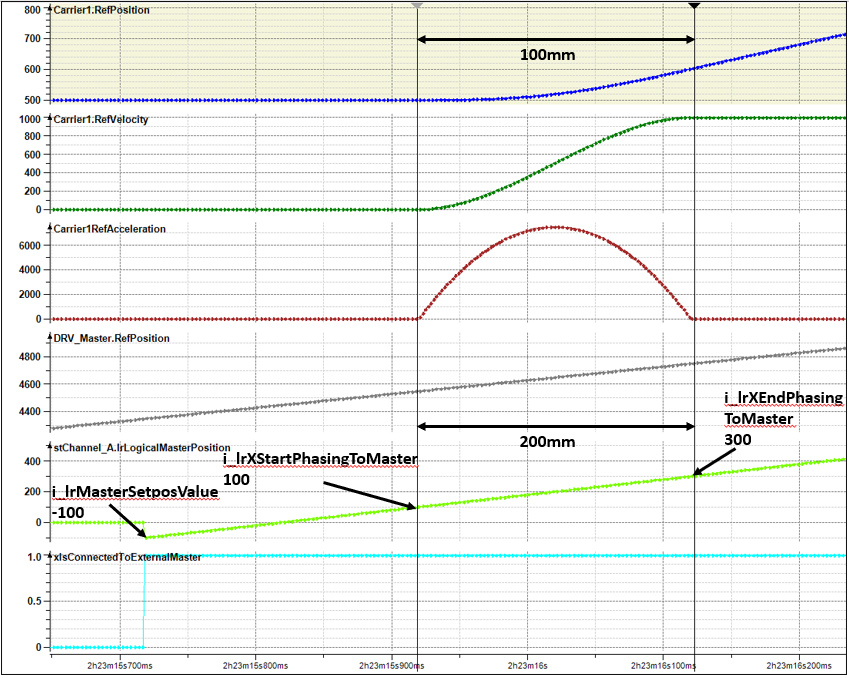
If i_lrXStartPhasingToMaster = 100 and i_lrXEndPhasingToMaster = 300, the master moves 200 mm while the selected carrier (connected carrier) moves 100 mm during phasing up.
Inputs
|
Input |
Data type |
Description |
|---|---|---|
|
i_ifMaster |
Access to the interface of the external master. For more information on the interface IF_Master, refer to the SystemConfigurationItf library. |
|
|
i_etMasterSetposMode |
Access to the enumeration ET_SetposMode for the Setpos of the master position. For more information on the enumeration ET_SetposMode, refer to the PD_SoMotionGenerator library |
|
|
i_lrMasterSetposValue |
LREAL |
Value for the Setpos of the master position |
|
i_lrXStartPhasingToMaster |
LREAL |
Position of the external master where the phasing (synchronization) of the carrier to the master movement starts.
NOTE: i_lrXStartPhasingToMaster < i_lrXEndPhasingToMaster
|
|
i_lrXEndPhasingToMaster |
LREAL |
Position of the external master where the phasing (synchronization) of the carrier to the master movement ends.
NOTE: i_lrXEndPhasingToMaster > i_lrXStartPhasingToMaster
|
|
i_xMasterPositiveDirection |
BOOL |
If i_xMasterPositiveDirection is set to TRUE, the external master is moving in positive direction. |
|
i_xInvertedMovementToMaster |
BOOL |
If i_xInvertedMovementToMaster is set to TRUE, the carrier moves in inverse direction of the master movement. If the master moves for example with positive velocity, the carrier moves with negative velocity. |
Outputs
|
Output |
Data type |
Description |
|---|---|---|
|
q_xError |
BOOL |
Indicates TRUE if an error has been detected. For details, refer to q_etResult and q_sResultMsg. |
|
q_etResult |
Provides diagnostic and status information as a numeric value. |
|
|
q_sResultMsg |
STRING [255] |
Provides additional diagnostic and status information as a text message. |