IF_Configuration - Gantry2Ax (Method)
Overview
|
Type: |
Method |
|
Available as of: |
V2.6.0.0 |
Robots of all types inherently present various hazards to machine operators, maintenance personnel, and commissioners. Some of these hazards may be the result of improper/invalid programming control or system parameterization/configuration. To help avoid as much as possible these hazards/situations, the library SchneiderElectricRobotics has been developed dedicated to Schneider Electric robots.
| WARNING | |
|---|---|
The library SchneiderElectricRobotics facilitates:
-
The parameterization of the robot.
-
The monitoring of the robot axes parameters.
-
GearIn and GearOut
-
FeedConstant
-
Maximum current
-
Direction
-
Maximum speed
-
-
The monitoring of the work envelope of the robot.
This chapter provides information on:
Description
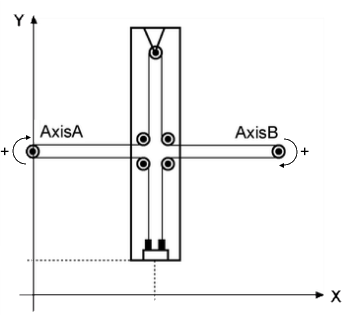
With the method Gantry2Ax(...), a transformation for a gantry robot with two axes can be configured.
Interface
|
Input |
Data type |
Description |
|---|---|---|
|
i_ifDriveA |
Drive of axis A. |
|
|
i_ifDriveB |
Drive of axis B. |
|
|
i_etPlane |
Specification in which working plane the robot is operating. |
|
Output |
Data type |
Description |
|---|---|---|
|
q_etDiag |
General library-independent statement on the diagnostic. A value not equal to ET_Diag.Ok corresponds to a diagnostic message. |
|
|
q_etDiagExt |
POU-specific output on the diagnostic. q_etDiag = ET_Diag.Ok -> Status message q_etDiag <> ET_Diag.Ok -> Diagnostic message |
|
|
q_sMsg |
STRING[80] |
Event-triggered message that gives additional information on the diagnostic state. |
Diagnostic Messages
|
q_etDiag |
q_etDiagExt |
Enumeration value |
Description |
|---|---|---|---|
|
OK |
Ok |
0 |
Ok |
|
ExecutionAborted |
ConfigurationAlreadyCompleted |
105 |
The configuration is already completed. |
|
ExecutionAborted |
TransformationAlreadyConfigured |
106 |
The transformation is already configured. |
|
InputParameterInvalid |
DriveAAlreadyInUse |
36 |
The drive A is already in use. |
|
InputParameterInvalid |
DriveAInvalid |
48 |
The drive A is invalid. |
|
InputParameterInvalid |
DriveBAlreadyInUse |
37 |
The drive B is already in use. |
|
InputParameterInvalid |
DriveBInvalid |
49 |
The drive B is invalid. |
|
InputParameterInvalid |
PlaneInvalid |
107 |
The working plane is invalid. |
Ok
|
Enumeration name: |
Ok |
|
Enumeration value: |
0 |
|
Description: |
Ok |
The configuration of the robot transformation was successful.
ConfigurationAlreadyCompleted
|
Enumeration name: |
ConfigurationAlreadyCompleted |
|
Enumeration value: |
105 |
|
Description: |
The configuration is already completed. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the robot transformation was not successful. |
The configuration of the robot has already been completed. The method ConfigDone(...) has already been called successfully. |
Ensure that no transformation configuration method, for example Delta3Ax(...) or AddAuxAx(...), is called after the configuration has been completed. |
TransformationAlreadyConfigured
|
Enumeration name: |
TransformationAlreadyConfigured |
|
Enumeration value: |
106 |
|
Description: |
The transformation is already configured. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the robot transformation was not successful. |
The configuration of the robot transformation has already been completed successfully. |
Ensure that a configuration for a transformation is only called once. |
DriveAAlreadyInUse
|
Enumeration name: |
DriveAAlreadyInUse |
|
Enumeration value: |
36 |
|
Description: |
The drive A is already in use. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the robot transformation was not successful. |
The drive transferred at the input i_ifDriveA is already configured in the robot and cannot be used again. |
Ensure that no drive is assigned to the robot more than once, and correct if necessary. |
DriveAInvalid
|
Enumeration name: |
DriveAInvalid |
|
Enumeration value: |
48 |
|
Description: |
The drive A is invalid. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the robot transformation was not successful. |
The drive transferred at the input i_ifDriveA is invalid. |
At the input i_ifDriveA, a valid drive must be transferred. |
DriveBAlreadyInUse
|
Enumeration name: |
DriveBAlreadyInUse |
|
Enumeration value: |
37 |
|
Description: |
The drive B is already in use. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the robot transformation was not successful. |
The drive transferred at the input i_ifDriveB is already configured in the robot and cannot be used again. |
Ensure that no drive is assigned to the robot more than once, and correct if necessary. |
DriveBInvalid
|
Enumeration name: |
DriveBInvalid |
|
Enumeration value: |
49 |
|
Description: |
The drive B is invalid. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the robot transformation was not successful. |
The drive transferred at the input i_ifDriveB is invalid. |
At the input i_ifDriveB, a valid drive must be transferred. |
PlaneInvalid
|
Enumeration name: |
PlaneInvalid |
|
Enumeration value: |
107 |
|
Description: |
The working plane is invalid. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the robot transformation was not successful. |
The value transferred at the input i_etPlane is invalid. |
At the input i_etPlane, a value contained in ET_WorkingPlane must be transferred. |