FB_ClampingStation - SetStationParameter (Method)
Task
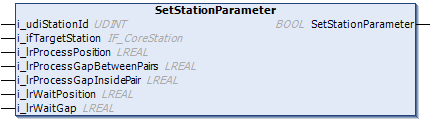
Setting the parameters of the clamping station and specifying the target station to which the pair of carriers will be handed over.
Description
-
the target station to which the pair of carriers will be transferred
-
the process position for clamping as well as the gap between the pairs and the gap within the pair(s) in process position
-
the waiting position and the gap between the carriers in waiting position
For more information on the waiting position and the process position, refer to the general description of Standard Stations.
The return value SetStationParameter of type BOOL indicates TRUE if a target station has been assigned successfully.
Inputs
|
Input |
Data type |
Value range |
Unit |
Description |
|---|---|---|---|---|
|
i_udiStationId |
UDINT |
– |
– |
Specifies the ID of the station. |
|
i_ifTargetStation |
– |
– |
Input for assigning the target station. |
|
|
i_lrProcessPosition |
LREAL |
0.0 ≤ i_lrProcessPosition ≤ lrTrackLength(1) |
mm |
Specifies the process position. |
|
i_lrProcessGapBetweenPairs |
LREAL |
≥ 0.0 |
mm |
Specifies the gap between the pairs at the process position. |
|
i_lrProcessGapInsidePair |
LREAL |
≥ 0.0 |
mm |
Specifies the gap within the pair(s) at the process position. |
|
i_lrWaitPosition |
LREAL |
0.0 ≤ i_lrWaitPosition ≤ lrTrackLength(1) |
mm |
Specifies the waiting position before the process position. |
|
i_lrWaitGap |
LREAL |
≥ 0.0 |
mm |
Specifies the gap between the carriers at the waiting position. |
|
(1) For more information on the TrackLength, refer to the Multicarrier library. |
||||