|
Virtual mode |
The drive is replaced by a simulation that is similar to a virtual drive unit. When there is a coupled drive, this does not have any effect on the fieldbus device. They function as usual without sending or receiving messages to or from a physical device. Note: You can also set and reset a virtual mode of a drive in IEC code by means of the SMC3_ReinitDrive function block. |
|
Modulo |
Modulo value [u]: Value of one cycle (modulo period). The value is saved in the fPositionPeriod parameter of the AXIS_REF_SM3 function block. Note: If you select the Modulo drive type, then the product fPositionPeriod * dwRatioTechUnitsDenom must be an integer. |
|
Limited |
Software limit switches
Activated
|
|
Software error reaction |
|
|
Deceleration [u/s²]: |
Deceleration value when reaching the limit switch. |
|
Max. distance [u] |
Optional The drive must have reached a standstill within this distance after an error has occurred. |
|
Dynamic limits: The limiting values from PLCopen Part 4 POUs are taken into consideration. Moreover, they are used by library modules with the name SMC_ControlAxisBy* for detecting jumps. |
|
|
Velocity [u/s] |
Limiting value of velocity, acceleration, deceleration, and jerk |
|
Acceleration [u/s²] |
|
|
Delay [u/s²] |
|
|
Jerk [u/s³] |
|
|
Defines the velocity profile for motion-generating single-axis and master/slave modules: Note: The ramp types Sin² and Quadratic (smooth) are not supported for the robotics. |
|
|
Trapezoid |
Trapezoidal velocity profile (with constant acceleration in each segment) |
|
Sin² |
A velocity profile as defined by the sin² function (with constant acceleration curve). |
|
Quadratic |
Acceleration profile in trapezoidal form with jerk limitation. |
|
Quadratic (smooth) |
Like Quadratic but generates a jerk profile without jumps. |
|
ID |
Integer identifier. Should be unique for each drive. For example, this identifier is used in the PLC log in order to identify the drive when an error occurs. |
|
Notice: Drag error monitoring is not available for virtual drives. System response to a detected drag error. A drag error is detected when the difference between the set position and the compensated actual position exceeds the drag error limit. The extrapolated actual position is calculated in the following formula: extrapolated actual position := actual position + actual velocity * cycle time * axis.fSetActTimeLagCycles This value is approximately the position that the axis will have in fSetActTimeLagCycles cycles. The value compensates the virtual drag error that forms by the time displacement due to communication. The fSetActTimeLagCycles parameter is defined in the AXIS_REF_SM3 function block. Note: When you monitor the drag error, you should determine the value for fSetActTimeLagCycles and specify it in the parameters of the drive axis. For a description, refer to the section "Determining the Dead Time of the System - Determining the Dead Time of the System" |
|
|
Deactivated |
No response or drag error monitoring is deactivated. |
|
Disable drive |
The bRegulatorOn bit is forced to FALSE (compare with MC_Power input) which first forces the deceleration of the drive and then the deactivation of the drive (depending on the drive implementation). |
|
Do quickstop |
The bDriveStart bit is forced to FALSE (compare with MC_Power input) which forces the drive to perform a quickstop. |
|
Stay enabled |
The drive remains switched on, but all running movements are stopped abruptly. |
|
Position lag limit: |
Drag error monitoring in the controller. Independent monitoring can also exist in the drive, but it is not configured in this dialog. |
|
Requirement: The PLC is in online mode. |
|
|
Variable table |
List of drive variables with variable name, Set value and Current value |
|
Status |
Display of the current status of the SoftMotion drive |
|
Communication |
Display of the current communication status |
|
Error |
|
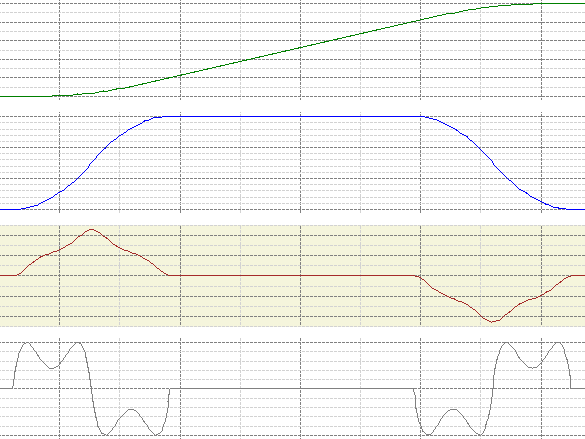
Example
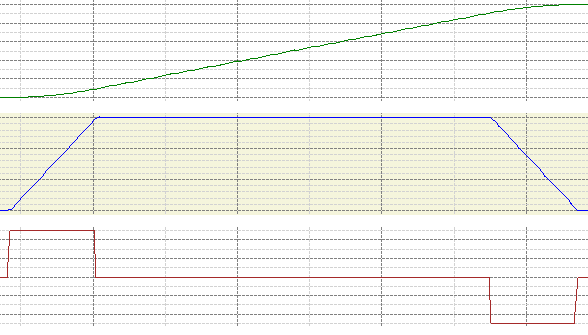
The following images demonstrate the effect of the different ramp types. The position is drawn in green, the velocity in red, and the acceleration in blue.
|
Trapezoid The velocity is partially linear and continuous, whereas the partially constant acceleration indicates jumps. |
|
|
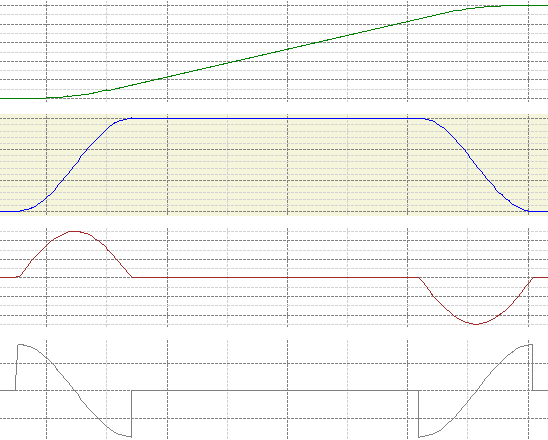
Sin² The breaks in the velocity profile are smoothed (by using the sin² function instead of lines) to reduce the jumps in acceleration. The user cannot limit the jerk for this ramp type. The set maximum jerk has an effect only if the acceleration dies not equal zero at the beginning of the movement and the interrupted deceleration and acceleration ramp cannot be continued seamlessly. Then, taking the jerk limit into account, the acceleration is decreased to zero before the current movement is started. As compared to the trapezoidal velocity profile, the deceleration takes more time in this case. |
|
|
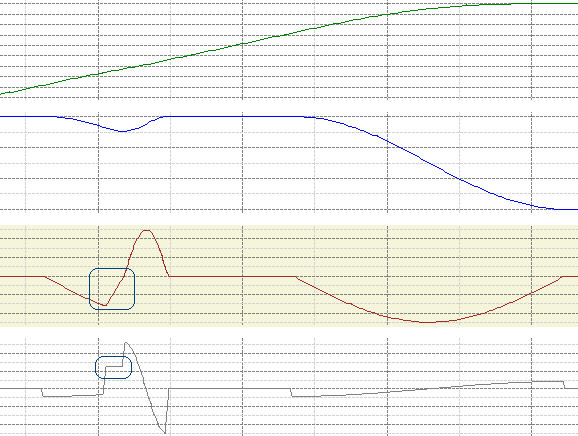
Quadratic The acceleration is partially linear and continuous and the jerk has jumps. The velocity consists of quadratic and linear segments. |
|
|
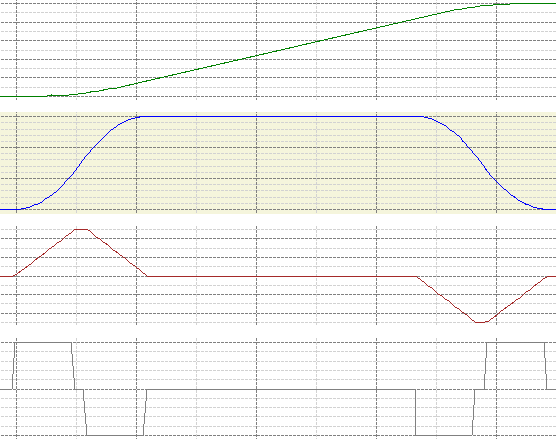
Quadratic (smooth) The linear acceleration ramps of the quadratic ramp type are replaced by a smooth function with a slope is zero at the beginning and end. In this way, the jerk is also continuous. Note: If a movement is interrupted, then breaks in the jerk can result. |
|
See also