FUNCTION_BLOCK Kin_Tripod_Linear IMPLEMENTS ISMPositionKinematics_Offset,
ISMPositionKinematicsInternal, ISMKinematicWithInfo2, ISMKinematicAxisSettings, ISMKinematicWithInitialization
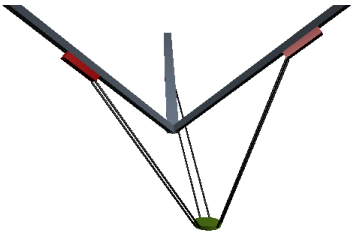
Transformation FB for Tripod kinematics with linear axes
This system consists of three linear drives on rails with traversing sliders. The guide rails are fixed parallel to the vertical axis. The tool plate is connected to all three traversing sliders with three pairs of connecting rods of equal length. The paired design of connecting rods holds the tool plate in the same orientation parallel to the XY plane. This kinematic design allows the tool plate to move within three dimensions.
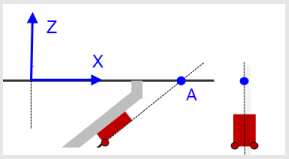
The XY plane and the origin are defined in such a way that the intersection-points (A) of the axes of motion with the XY plane lie on a circle around (0,0,0). The Z axis extends away from the construction. The point that moves between the connecting rod joints on a slider geometrically defines the axis. The position of an axis is the distance between this midpoint and point A, while positive positions correspond to negative Z values.
Mechanical requirements:
The lengths of the three rails must be equal.
The lengths of all connecting rods must be equal.
The distance between the two connecting rods in each pair must be equal.
The axis angle between the drive rail and the vertical axis must be equal for all three drives. The angle allowance is between 0° and 90°.
The orientation of the tool coordinate system equals the one of the machine coordinate system.
The single axes values have the following interpretation:
|
a0 |
position of the 1st axis of the machine (A1) |
|
a1 |
position of the 2nd axis of the machine (A2) |
|
a2 |
position of the 3rd axis of the machine (A3) |
Attributes:
sm_kin_libdoc
InOut:
|
Scope |
Name |
Type |
Comment |
|
Input |
dOuterRadius |
LREAL |
Radius of outer ring. Point A is the intersection of the axis with the XY plane. 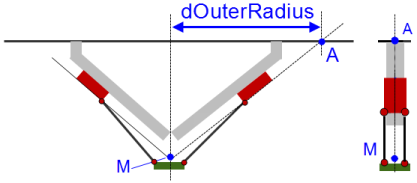
|
|
dInnerRadius |
LREAL |
Distance from the center of the tool plate to the gripping points of the connecting rods. 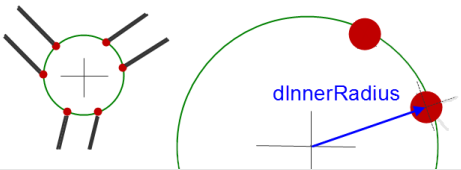
|
|
|
dLength |
LREAL |
Length of the connecting rods |
|
|
dDistance |
LREAL |
Distance between the two connecting rods forming one pair |
|
|
dAxisAngle |
LREAL |
Absolute angle between rails and Z axis |