Basiskonzept von RoboticsAutoTune
Ohne die Verwendung von RoboticsAutoTune werden die gleichen Bewegungsparameter für jede Bewegung verwendet. Dies kann zu einer Einschränkung der Roboterleistung durch die ungünstigste Bewegung führen. Das individuelle Einstellen jeder einzelnen Bewegung kann nur erfolgen, wenn die Anzahl an Bewegungen begrenzt ist; andernfalls entsteht dem Nutzer ein hoher Aufwand.
Wird RoboticsAutoTune auf Grundlage einiger Randbedingungen verwendet, kann das System in einer Trainingseinheit oder im Produktionsmodus jede Bewegung individuell messen, auswerten und anpassen.
Deshalb muss eine minimale und maximale Beschleunigung zusammen mit einigen Schleppfehlerschwellen festgelegt werden. Während der Ausführung einer Einstellung versucht der Roboter, die Beschleunigung und Verzögerung für jede Bewegung anzupassen, um die maximale Leistung zu erzielen, während der TCP (Tool Center Point) innerhalb der vorgesehenen Schleppfehlerschwellen beibehalten wird.
Verwaltung des Arbeitsraumes des Roboters
Der Roboter weist innerhalb seines Arbeitsraumes ein nicht-lineares Verhalten auf. Selbst eine Bewegung zwischen zwei festen Positionen muss unterschiedlich gehandhabt werden. Bei einer Bewegung von Position A nach Position B kann es ggf. erforderlich sein, andere Parameter als auf dem Weg zurück von B nach A zu verwenden.
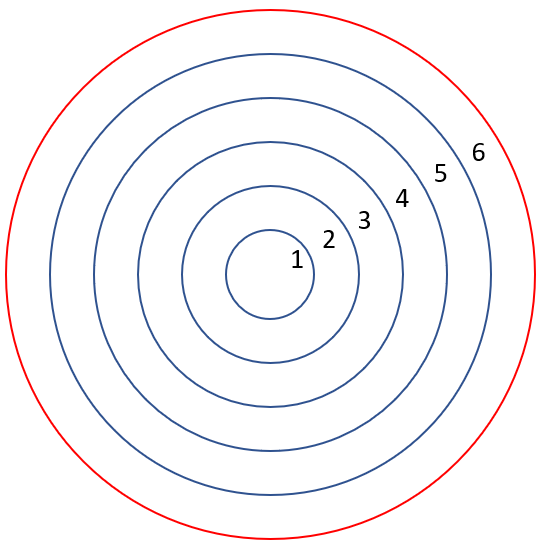
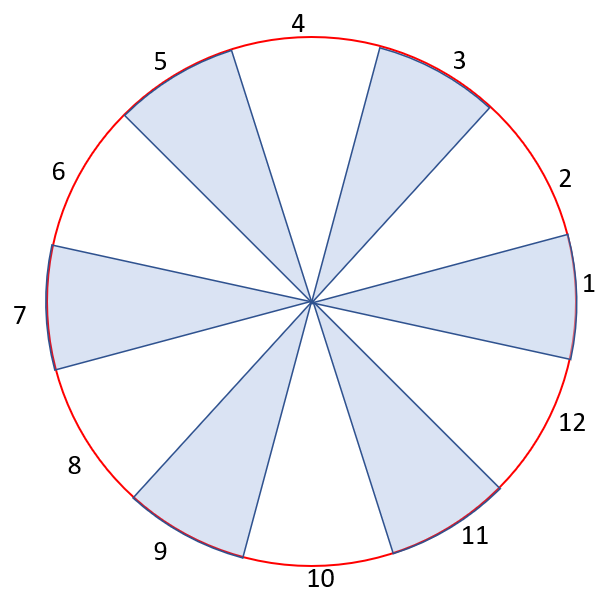
Um bestimmte Bewegungen gruppieren zu können, ist der Arbeitsraum des Roboters zylinderförmig und wird in zwei Bereiche unterteilt. Bei der Draufsicht ist der Kreis in einen Satz von Ringen und einen Satz von Winkelbereichen unterteilt.
Arbeitsraum unterteilt in Ringe / Arbeitsraum unterteilt in Bereiche
|
|
Das bedeutet, die Segmente können zum Gruppieren der Bewegungen verwendet werden.
Arbeitsraum unterteilt in Segmente
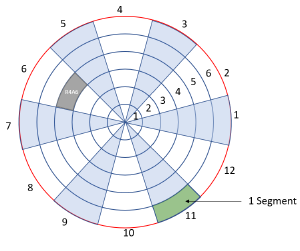
Jedes Segment kann anhand eines Radiusindex und eines Winkelindex beschrieben werden. Das graue Segment im nachfolgenden Diagramm besitzt beispielsweise einen Radiusindex von 4 und einen Winkelindex von 6 (R4A6).
Arbeitsraum mit unterschiedlichen Höhenindizes
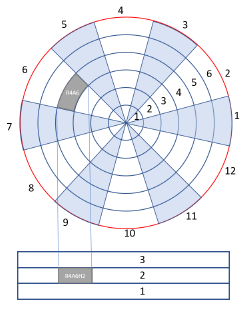
Zudem kann der Zylinder in mehrere horizontale Abschnitte unterteilt werden, wenn mehr als eine Schicht erforderlich ist, beispielsweise wenn Produkte gestapelt werden sollen.
Beispiel: Start- und Zielposition und ihre jeweiligen Segment-Koordinaten
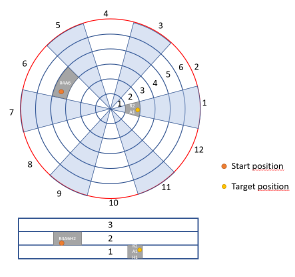
Wenn die Bewegung des Roboters per Auto-Tuning erfolgen soll, werden die Start- und Zielkoordinaten in Segment-Koordinaten eingerechnet. Im obigen Beispiel befindet sich die Startposition im Sektor R4A6H2, während die Zielposition sich im Sektor R2A1H1 befindet.
Beispiel: Bewegungen mit denselben Segment-Koordinaten
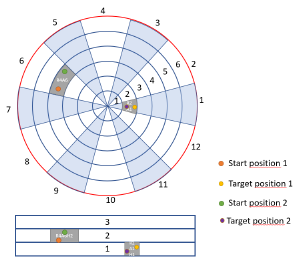
Bewegungen, die mit denselben Segmenten starten bzw. enden, werden als eine Bewegung berücksichtigt.
Beispiel: Bewegungen mit unterschiedlichen Segment-Koordinaten
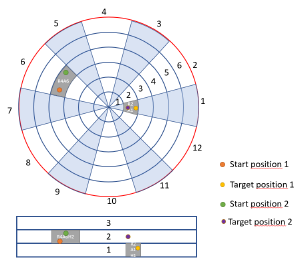
Wenn die Zielposition 2 höher liegt, werden die Bewegungen nicht länger als eine berücksichtigt, da sich das zweite Ziel in einem anderen Höhenindex befindet.
Auswirkung auf Systemressourcen und Dateigröße
Da jedes Segment einzeln gespeichert wird, steht die Anzahl der Segmente in direktem Zusammenhang mit der Speicherverwendung des FB_RoboticsAutoTunePSeries und der Größe der Datei, in der die Daten gespeichert sind.
Darüber hinaus ist es wichtig zu wissen, dass jede Position mit dem vollständigen Satz an Gegenstücken gespeichert wird, d. h., die Anzahl an Datensätzen beträgt (Gc_udiNumberOfRadiusSteps * Gc_udiNumberOfAngleSteps * Gc_udiNumberOfHeightSteps)² * Gc_udiNumberOfMoveIds.
Dies führt zu einer Datengröße von ca. 500 Kb für eine Standardkonfiguration.
Jedes Mal, wenn eine Bewegung mit denselben Start- und Endsegment-Koordinaten durch den Roboter ausgeführt wird, erfolgt eine Messung und Auswertung.
Wenn nur ein Anteil des verfügbaren Stroms an den Motoren verwendet wird, erhöht der Algorithmus für die schnelle Einstellung die minimale Beschleunigung für alle anderen Bewegungen, wenn keine andere Begrenzung überschritten wird.
Dies führt schnell zu einer angemessenen Leistung des Roboters, sofern die minimale Beschleunigung mit einem eher niedrigen Wert konfiguriert ist.
Falls der Schleppfehler eher gering ist, versucht ein Einstellungs-Algorithmus den Roboter innerhalb mehrerer Zyklen zu einer hohen Leistung zu bringen. Sobald die Einstellung abgeschlossen ist, meldet der Status der Bewegung xTuningDone, und die Feineinstellung wird gestartet. An dieser Stelle hat der Roboter seine maximale Leistung für diese Bewegung noch nicht erreicht.
Abhängig von der Konfiguration kann der Feineinstellungs-Prozess mehr Zeit in Anspruch nehmen. Wenn die Schleppfehlerschwellen hoch sind, benötigt der Algorithmus mehrere Zyklen, um die maximale Leistung zu erreichen, da die Beschleunigung und die Verzögerung vorsichtig überschritten werden, sodass die angegebenen Schleppfehlerschwellen nicht überschritten werden.
Sobald mindestens eine Begrenzung überschritten wurde, wird die Bewegung als feineingestellt markiert.
Der Einstellungs-Algorithmus kann während der Produktion aktiv bleiben. In diesem Fall setzt der Algorithmus die Auswertung fort und verringert ggf. die Bewegungsparameter.
Durch den Einstellungs-Algorithmus überwachte Parameter, die direkte Auswirkungen auf die Einstellung haben
Beschleunigung und Verzögerung werden unabhängig voneinander eingestellt. Beide werden in Bezug auf die angegebenen Begrenzungen so hoch wie möglich gesetzt. Dies bedeutet, dass beide Bewegungsparameter unterschiedlich sind und ihre begrenzenden Faktoren womöglich ebenfalls unterschiedlich sind. Aus Gründen der Übersichtlichkeit wird nachfolgend ausschließlich die Beschleunigung beschrieben. Es gelten die gleichen Grundsätze für die Verzögerung.
Die folgenden Parameter werden durch den Algorithmus überwacht und haben direkte Auswirkungen auf die Einstellung:
oSchleppfehler am TCP während der Bewegung und Schleppfehler am TCP nahe am Ziel:
Wenn die Schleppfehlerschwelle überschritten wird, wird die Beschleunigung der Bewegung verringert bis keine Überschreitung auftritt. Die Beschleunigung wird nicht bis unterhalb der minimalen Beschleunigung verringert, die für das Auto-Tuning konfiguriert wurde. Falls der Schleppfehler noch immer zu hoch ist, muss die Einstellung mit einer geringeren Mindestbeschleunigung neu gestartet werden.
oGeschwindigkeit der Antriebe oder Achsen mit Geschwindigkeitsbegrenzung an den Antrieben:
Falls die Antriebe die maximale Geschwindigkeit erreichen, oder die Funktion VelocityLimitationAxes die Antriebsgeschwindigkeit verringert, wird die Beschleunigung nicht weiter erhöht.
oBewegungsparameter Ramp:
Wenn die Beschleunigung keinen höheren Wert erreichen kann, weil die Rampe den Beschränkungsfaktor darstellt, wird die Beschleunigung nicht weiter erhöht.
oBewegungsparameter MaxVelocity:
Wenn die maximale Geschwindigkeit der Bewegung erreicht wird, erfolgt keine weitere Erhöhung der Beschleunigung.
oMaximale Beschleunigung des Auto-Tuning:
Wenn die maximale Beschleunigung des Auto-Tuning erreicht wurde, erfolgt keine weitere Erhöhung.
Durch den Einstellungs-Algorithmus überwachte Parameter, die keine direkten Auswirkungen auf die Einstellung haben
Die folgenden Parameter werden durch den Algorithmus überwacht:
oBewegungen der Hilfsachsen, die den Roboter zu einer Verringerung der Geschwindigkeit zwingen:
Wenn die Bewegung einer Hilfsachse die Geschwindigkeit des Roboters begrenzt, dann wird diese Bewegung verworfen und für die Einstellung nicht berücksichtigt. Wenn möglich sollte die Einstellung ohne eine Beeinträchtigung durch die Hilfsachsen erfolgen.
oBeschleunigungsbegrenzung am TCP:
Wenn die Beschleunigungsbegrenzung am TCP die Geschwindigkeit des Roboters begrenzt, dann wird diese Bewegung verworfen und für die Einstellung nicht berücksichtigt. Wenn möglich sollte die Einstellung ohne eine Beeinträchtigung durch die Beschleunigungbegrenzung erfolgen.
oEine Verzögerungsphase, auf die eine Beschleunigungsphase folgt:
Wenn der Roboter eine Verzögerungsphase erkennt, auf die eine Beschleunigungphase folgt, dann wird diese Bewegung verworfen und für die Einstellung nicht berücksichtigt. Ein Grund für diese Verzögerungsphase könnte unter anderem ein StopOnPath, eine Änderung von VelOverride oder ein zu spät gesendeter Bewegungsbefehl sein. Wenn möglich sollte die Einstellung ohne eine Beeinträchtigung durch diese Funktionen erfolgen.
Vom Einstellungs-Algorithmus nicht überwachte Parameter
Die folgenden Parameter werden nicht durch den Algorithmus überwacht, jedoch könnten Sie den Einstellungsprozess beeinträchtigen:
oSchleppfehler der Antriebe:
Falls die Schleppfehlerschwelle der Antriebe überschritten wird, reagiert der Algorithmus auf dieses Ereignis wie auf jede andere Systemausnahme.
Falls eine Schleppfehlermeldung oder eine Schleppfehlerausnahme a den Roboterantrieben auftritt, müssen die Parameter des Auto-Tunings übernommen werden. Verringern Sie die Schleppfehlerschwellen und ggf. die minimale Beschleunigung. Alternativ kann die Schleppfehlerschwelle der Antriebe erhöht werden.
oAntriebsüberlast:
Wenn die Roboterantriebe eine Überlast melden, müssen die Parameter für das Auto-Tuning und die Bewegungsparameter des Roboters verringert werden. Wenn nur eine spezifische Bewegung eingestellt wird, kann es ausreichen, die Einstellung zu unterbrechen oder eine andere Bewegung einzustellen, sodass der Antrieb abkühlen kann.
oProdukt und Greifer
Es wird nicht überwacht, ob Produkt und Greifer die Beschleunigung durchführen können, die vom Auto-Tuning berechnet wird. Falls der Wert zu hoch ist, müssen die Parameter für das Auto-Tuning und die Bewegungsparameter des Roboters verringert werden.