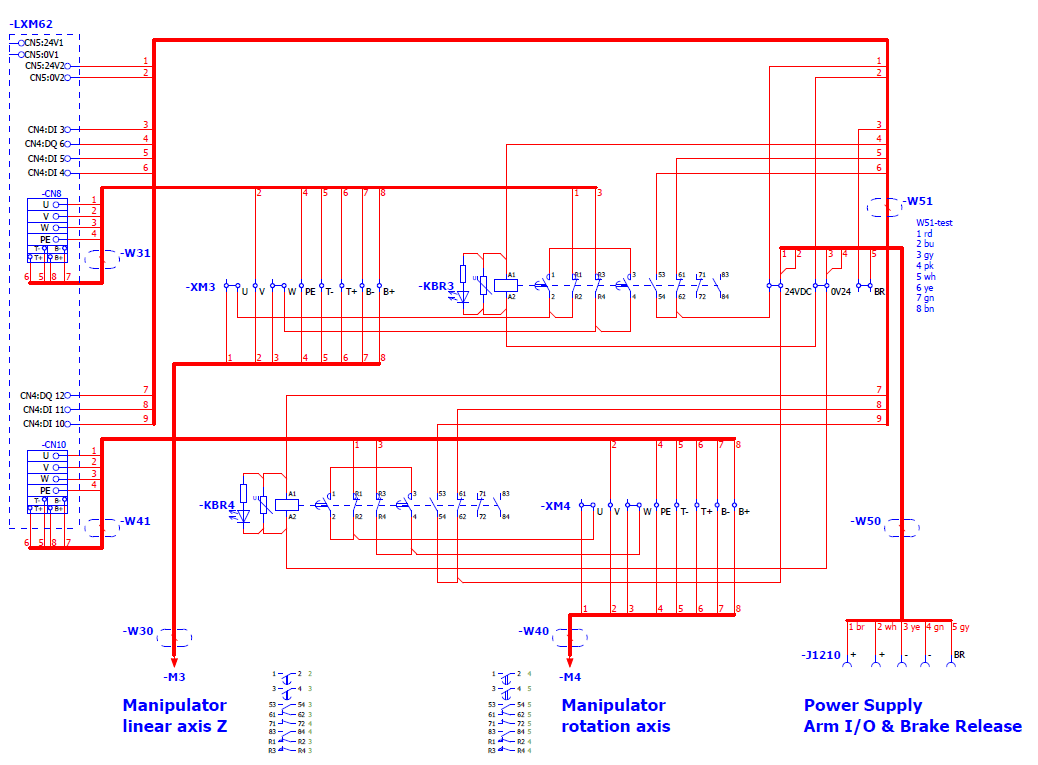
Verdrahtung des Tasters zur Freigabe der Bremse
Pin 5 des Kabels (VW3E1169R050) auf Steckverbinder X1210 muss mit dem dritten Digitaleingang des Antriebs, der für den Motor / Achse 3 (CN4 Pin 3 überbrückt an Pin 9) verwendet wird, verbunden werden, um den Taster zur Freigabe der Bremse verwenden zu können.
Der Steckverbinder X1210 überträgt das Signal des Tasters zur Freigabe der Bremse vom Roboter zur Steuerung.
Die Drähte für 24 VDC und 0 V des Steckverbinders X1210 müssen an CN5 des Antriebs angeschlossen werden (Pin 1 und Pin 2 von X1210 -> Pin 1 von CN5, Pin 3 und Pin 4 von X1210 -> Pin 2 von CN5).
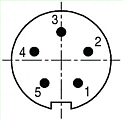
Pin-Belegung des VW3E1169R050-Kabels
|
Darstellung |
Pin |
Bezeichnung |
Beschreibung |
|---|---|---|---|
|
1 |
24 VDC (in) |
Versorgungsspannung |
|
2 |
24 VDC (in) |
Versorgungsspannung |
|
|
3 |
0 V |
Versorgungsspannung |
|
|
4 |
0 V |
Versorgungsspannung |
|
|
5 |
24 VDC |
Signal beim Betätigen des Tasters zur Freigabe der Bremse. |
Steckverbinder von Lexium 62 Servo Drive
Steckverbinder CN4 von Lexium 62 Single Drive
Pin 3 muss verbunden werden.
Steckverbinder CN4 von Lexium 62 Double Drive
Pin 3 bzw. Pin 9 müssen verbunden werden.
Steckverbinder CN5 von Lexium 62 Servo Drive
Pin 1 und Pin 2 müssen verbunden werden.
Zwei Doppelantriebe werden zur Stromversorgung der vier Achsen des SCARA verwendet.
o1. Doppelantrieb A -> Motor/Achse A
o1. Doppelantrieb B -> Motor/Achse B
o2. Doppelantrieb A -> Motor/Achse C
o2. Doppelantrieb B -> Motor/Achse D
Verbinden Sie Pin 5 des Steckverbinders X1210 mit CN4 Pin 3 des zweiten Doppelantriebs.
Die Drähte zur Steuerung und Überwachung der Schütze des zusätzlichen Schaltkreises müssen mit den OnBoard E/A von Antrieb C und D verbunden werden (CN4 Pin4 und Pin 10 Öffner, Pin 5 und Pin 11 Schließer, Pin 6 und Pin 12 Steuersignal für die Schütze). Aus diesem Grund erfordern beide Antriebe verbundene OnBoard E/A innerhalb der Gerätebaumstruktur.
Um eine ordnungsgemäße Funktion zu gewährleisten, müssen die als Ausgänge verwendeten Pins auch als Ausgänge innerhalb der Steuerung konfiguriert werden. (Antrieb C / Antrieb D -> LXMx2IO_InOutTP: Parameter IO5_Mode muss auf Ausgang gesetzt werden und Parameter IO4_Mode muss auf Eingang gesetzt werden).
Beispiel: